Estaba viendo un video de mega fábrica y me preguntaba por qué usan un motor de CA que requiere un inversor de energía en lugar de CC, que puede alimentarse directamente de su batería de CC. La introducción de un inversor significa más costo (peso, controlador, etc.).
¿Hay alguna razón para eso? ¿Cuáles son las diferencias entre un motor de CA y CC que pueden haber llevado a esta decisión? Además, ¿alguien sabe qué tipo de motor se usa en otros autos eléctricos?
Está preguntando acerca de las compensaciones técnicas que rodean la selección de un motor de tracción para una aplicación de vehículo eléctrico. Describir el espacio comercial completo del diseño va mucho más allá de lo que razonablemente se puede resumir aquí, pero describiré las ventajas y desventajas del diseño prominentes para una aplicación de este tipo.
Debido a que la cantidad de energía que se puede almacenar químicamente (es decir, en una batería) es bastante limitada, casi todos los vehículos eléctricos se diseñan teniendo en cuenta la eficiencia. La mayoría de los motores de tracción para aplicaciones de tránsito para aplicaciones automotrices varían entre 60kW y 300kW de potencia máxima. La ley de Ohm indica que las pérdidas de energía en el cableado, los devanados del motor y las interconexiones de la batería son P=I 2 R. Por lo tanto, reducir la corriente a la mitad reduce las pérdidas resistivas en 4x. Como resultado, la mayoría de las aplicaciones automotrices funcionan con un voltaje de enlace de CC nominal entre 288 y 360 V nom (también hay otras razones para esta selección de voltaje, pero concentrémonos en las pérdidas). El voltaje de suministro es relevante en esta discusión, ya que ciertos motores, como Brush DC, tienen límites superiores prácticos en el voltaje de suministro debido al arco del conmutador.
Ignorando tecnologías de motores más exóticas como la reluctancia conmutada/variable, existen tres categorías principales de motores eléctricos utilizados en aplicaciones automotrices:
Motor de CC con escobillas : conmutado mecánicamente, solo se requiere un simple "chopper" de CC para controlar el par. Si bien los motores Brush DC pueden tener imanes permanentes, el tamaño de los imanes para aplicaciones de tracción hace que su costo sea prohibitivo. Como resultado, la mayoría de los motores de tracción de CC son de bobinado en serie o en derivación. En tal configuración, hay devanados tanto en el estator como en el rotor.
Motor CC sin escobillas (BLDC): conmutado electrónicamente por inversor, imanes permanentes en el rotor, bobinados en el estator.
Motor de inducción : conmutado electrónicamente por inversor, rotor de inducción, devanados en el estator.
A continuación se presentan algunas generalizaciones descaradas con respecto a las compensaciones entre las tres tecnologías de motores. Hay muchos ejemplos de puntos que desafiarán estos parámetros; mi objetivo es solo compartir lo que consideraría valores nominales para este tipo de aplicación.
- Eficiencia:
Brush DC: Motor:~80%, controlador DC: ~94% (flyback pasivo), NET=75%
BLDC: ~93%, inverter: ~97% (flyback síncrono o control histerético), NET=90%
Inducción: ~91 %: inversor: 97 % (control flyback síncrono o histerético), NET=88 %
- Desgaste/Servicio:
Cepillo DC: Cepillos sujetos a desgaste; requieren reemplazo periódico. Aspectos.
BLDC: Rodamientos (vida útil)
Inducción: Rodamientos (vida útil)
- Costo específico (costo por kW), incluido el inversor
Brush DC: bajo: el motor y el controlador son generalmente económicos
BLDC: High: los imanes permanentes de alta potencia son muy costosos
Inducción: moderada: los inverters agregan costos, pero el motor es económico
- DC de escobillas de rechazo de calor : los bobinados en el rotor dificultan la eliminación de calor tanto del rotor como del conmutador con motores de alta potencia.
BLDC: Los devanados en el estator facilitan el rechazo de calor. Los imanes en el rotor tienen un calentamiento inducido por corrientes de Foucault de bajo a moderado.
Inducción: los devanados en el estator facilitan el rechazo del calor del estator. Las corrientes inducidas en el rotor pueden requerir refrigeración por aceite en aplicaciones de alta potencia (entrada y salida a través del eje, sin salpicaduras).
- Comportamiento de par/velocidad
Brush DC: Par de velocidad cero teóricamente infinito, el par cae al aumentar la velocidad. Las aplicaciones automotrices de CC con escobillas generalmente requieren relaciones de transmisión 3-4 para abarcar el rango automotriz completo de grado y velocidad máxima. Conduje un vehículo eléctrico con motor de CC de 24kW durante varios años que podía encender las llantas desde parado (pero luché por llegar a 65 MPH).
BLDC: par constante hasta la velocidad base, potencia constante hasta la velocidad máxima. Las aplicaciones automotrices son viables con una caja de cambios de relación simple.
Inducción: par constante hasta la velocidad base, potencia constante hasta la velocidad máxima. Las aplicaciones automotrices son viables con una caja de cambios de relación simple. Puede tomar cientos de ms para que se genere el par después de la aplicación de corriente
- Varios:
CC de escobillas: a voltajes altos, la formación de arcos en el conmutador puede ser problemática. Los motores de CC con escobillas se usan canónicamente en aplicaciones de carritos de golf y montacargas (24 V o 48 V), aunque los modelos más nuevos son de inducción debido a su eficiencia mejorada. El frenado regenerativo es complicado y requiere un controlador de velocidad más complejo.
BLDC: el costo de los imanes y los desafíos de ensamblaje (los imanes son MUY poderosos) hacen que los motores BLDC sean viables para aplicaciones de menor potencia (como los dos motores/generadores Prius). El frenado regenerativo viene esencialmente gratis.
Inducción: el motor es relativamente barato de fabricar, y la electrónica de potencia para aplicaciones automotrices ha bajado significativamente de precio en los últimos 20 años. El frenado regenerativo viene esencialmente gratis.
Una vez más, este es solo un resumen de alto nivel de algunos de los principales impulsores de diseño para la selección de motores. He omitido intencionalmente la potencia específica y el par específico, ya que tienden a variar mucho más con la implementación real.
Las otras respuestas son excelentes y llegan a las razones técnicas. Habiendo seguido a Tesla y al mercado de vehículos eléctricos en general durante muchos años, me gustaría responder a su pregunta de por qué Tesla usa motores de inducción.
Elon Musk (cofundador de Tesla) proviene del pensamiento de Silicon Valley (SV), donde "muévete rápido y rompe cosas" es el mantra. Cuando cobró varios cientos de millones en PayPal, decidió abordar (la exploración espacial y) los vehículos eléctricos. En SV-land, el tiempo/la velocidad para hacer las cosas lo es todo, así que buscó algo que pudiera usar como punto de partida para comenzar.
JB Straubel era un ingeniero de ideas afines (tanto espacial como EV) que se acercó a Musk poco después de que Musk hiciera público su interés en el espacio y EV.
Durante su primera reunión durante el almuerzo, Straubel mencionó una empresa llamada AC Propulsion que había desarrollado un prototipo de automóvil deportivo eléctrico utilizando un marco de automóvil en kit. Ya en su segunda generación, había cambiado recientemente a usar baterías de iones de litio, tenía un alcance de 250 millas, ofrecía mucho torque, podía pasar de 0 a 60 en menos de 4 segundos, pero, lo más relacionado con esta discusión, usaba: - lo has adivinado -- propulsión AC (motor de inducción).
Musk visitó AC Propulsion y salió muy impresionado. Intentó durante unos meses convencer a AC Propulsion para que comercializara el vehículo eléctrico, pero en ese momento no tenían interés en hacerlo.
Tom Gage, presidente de AC Propulsion, sugirió que Musk una fuerzas con otro pretendiente que consiste en Martin Eberhard, Marc Tarpenning e Ian Wright. Acordaron fusionar sus esfuerzos, Musk se convirtió en presidente y director general de diseño de productos, Eberhard se convirtió en director ejecutivo y Straubel se convirtió en director de tecnología de la nueva empresa a la que llamaron "Tesla Motors".
Así que ahí lo tienen, Tesla usa la inducción principalmente porque el primer prototipo viable que vio Musk la usó. La inercia (sin juego de palabras... ok, un poco) explica el resto ("Si no está roto...").
Ahora, en cuanto a por qué AC Propulsion lo usó en su prototipo Tzero, vea las otras respuestas ... ;-)
Si quieres la historia completa entra aquí o aquí .
Es difícil decir cuáles fueron las razones exactas de los ingenieros sin estar en el equipo de diseño, pero aquí hay algunas ideas:
Ambos motores requieren accionamientos similares. Los motores de CC con escobillas pueden funcionar directamente con una batería, pero el tipo de motor que está viendo en un vehículo eléctrico es un motor de CC sin escobillas. Los accionamientos de un motor de inducción y un motor de CC sin escobillas son muy similares. El control de un motor de inducción es probablemente más complejo en general.
Los motores sin escobillas de CC tienen imanes en el rotor. Esto es más costoso que un rotor de inducción con cobre. Además, el mercado de imanes es muy volátil. Por otro lado, un motor de inducción producirá mucho más calor en el rotor debido a las pérdidas I²R y las pérdidas en el núcleo.
El par de arranque en motores sin escobillas es generalmente más alto que en motores de inducción.
La eficiencia máxima de los motores sin escobillas es generalmente más alta que la de los motores de inducción, pero creo que leí en alguna parte que Tesla obtiene una eficiencia promedio más alta con su motor de inducción que con un motor sin escobillas. Sin embargo, lamentablemente no puedo recordar dónde lo leí.
Mucha gente está investigando las máquinas de renuencia conmutadas ahora. Las últimas conferencias de motor a las que he asistido han sido sobre la desgana conmutada. No requieren imanes y la eficiencia de este tipo de motores parece prometedora. Todo el mundo quiere alejarse de los imanes en los motores.
Entonces, como dije, dudo que alguien pueda responder a su pregunta, excepto los ingenieros de Tesla. Pero mi mejor conjetura es que probablemente tenga algo que ver con mi punto 4), pero no estoy seguro. Estoy seguro de que la volatilidad de los precios de los imanes también tiene algo que ver.
La respuesta proviene del propio personal de Tesla en el artículo Induction Versus DC Brushless Motors
Esta parte es particularmente notable:
En una unidad sin escobillas ideal, la fuerza del campo magnético producido por los imanes permanentes sería ajustable. Cuando se requiere un par máximo, especialmente a bajas velocidades, la intensidad del campo magnético (B) debe ser máxima, de modo que las corrientes del inversor y del motor se mantengan en sus valores más bajos posibles. Esto minimiza las pérdidas I² R (resistencia de corriente²) y, por lo tanto, optimiza la eficiencia. Del mismo modo, cuando los niveles de par son bajos, el campo B debe reducirse de manera que también se reduzcan las pérdidas por remolinos e histéresis debidas a B. Idealmente, B debe ajustarse de tal manera que la suma de las pérdidas de Foucault, histéresis e I² se minimice. Desafortunadamente, no existe una manera fácil de cambiar B con imanes permanentes.
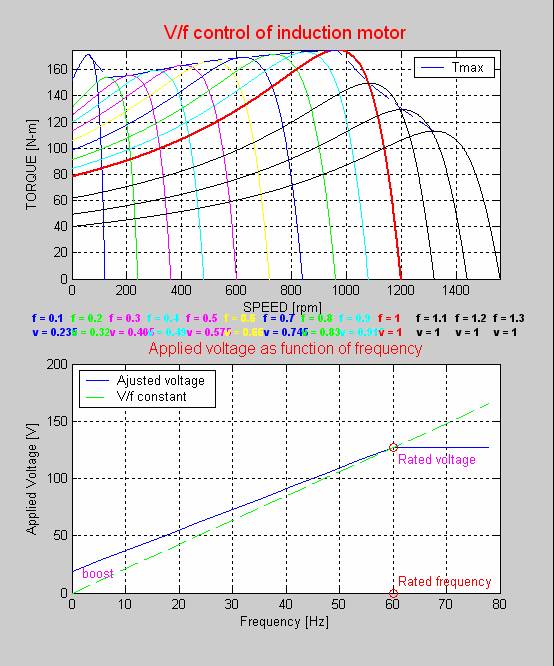
Por el contrario, las máquinas de inducción no tienen imanes y los campos B son "ajustables", ya que B es proporcional a V/f (voltaje a frecuencia). Esto significa que con cargas ligeras, el inversor puede reducir el voltaje de modo que se reduzcan las pérdidas magnéticas y se maximice la eficiencia. Por lo tanto, la máquina de inducción cuando funciona con un inversor inteligente tiene una ventaja sobre una máquina sin escobillas de CC: las pérdidas magnéticas y de conducción se pueden intercambiar para optimizar la eficiencia. Esta ventaja se vuelve cada vez más importante a medida que aumenta el rendimiento. Con CC sin escobillas, a medida que crece el tamaño de la máquina, las pérdidas magnéticas aumentan proporcionalmente y la eficiencia de carga parcial disminuye. Con la inducción, a medida que crece el tamaño de la máquina, las pérdidas no necesariamente aumentan. Por lo tanto, las unidades de inducción pueden ser el enfoque preferido cuando se desea un alto rendimiento;
Los imanes permanentes son caros, alrededor de $ 50 por kilogramo. Los rotores de imanes permanentes (PM) también son difíciles de manejar debido a las fuerzas muy grandes que entran en juego cuando algo ferromagnético se acerca a ellos. Esto significa que los motores de inducción probablemente mantendrán una ventaja de costos sobre las máquinas PM. Además, debido a las capacidades de debilitamiento de campo de las máquinas de inducción, las clasificaciones y los costos de los inversores parecen ser más bajos, especialmente para los variadores de alto rendimiento. Dado que las máquinas de inducción giratorias producen poco o ningún voltaje cuando se desexcitan, son más fáciles de proteger.
TODOS los motores eléctricos rotativos son motores de corriente alterna. Cada uno de ellos.
Además, en el fondo, esencialmente están haciendo lo mismo. La diferencia es cómo la CC se convierte en CA y cómo se utiliza para producir un resultado estándar.
El único motor que es electrónicamente DC es el motor del cepillo. La CC se convierte en CA mediante el conmutador giratorio y las escobillas fijas. Aparte de ese motor, todos los demás necesitarán algún tipo de conversión de CC a CA. El motor del cepillo generalmente no es atractivo porque el cambiador mecánico de CC a CA (conmutador) es relativamente costoso y de vida relativamente corta.
Por lo tanto, para un Tesla u otro vehículo eléctrico, la elección no es CC o CA, sino qué forma de motor de CA cumple mejor con los objetivos de diseño de manera rentable.
El Tesla usará lo que hace porque cumplió con los objetivos de diseño de manera más rentable.
Los votos negativos sugieren que varias personas están de acuerdo con Marcus y piensan que la respuesta anterior es quisquillosa. Un poco de reflexión y una mirada a mis respuestas en general pueden sugerir una falta de comprensión por parte de los votantes negativos.
Veamos si los votantes negativos tienen las agallas para leer lo siguiente y luego eliminar sus votos negativos. Para mí no importa. En la medida en que engañes a otras personas importa mucho.
TODOS los motores eléctricos rotativos requieren un controlador para aplicar CA al motor de alguna manera.
La distinción entre motor de CA y motor de CC es útil en algunos contextos, pero en un automóvil que es un sistema cerrado que comienza con una fuente de energía de CC y termina con un motor eléctrico rotativo, la distinción es falsa y no es útil. El coche es un sistema cerrado. En algún lugar del sistema hay un controlador que convierte la CC en CA de alguna forma. No importa si está montado dentro del rotor, estator o rotor, dentro de la carcasa del motor, unido a la carcasa o en algún otro lugar del automóvil.
En un motor de "CC" con escobillas, el "controlador" es un interruptor mecánico montado en el extremo del eje del motor. Este controlador se llama conmutador, pero funcionalmente es un controlador que toma CC y crea un campo magnético de CA de cola en lo que respecta a los devanados del motor.
Un "motor de CC sin escobillas" con rotor de imán permanente es muy similar funcionalmente a un motor de CC con escobillas, con el conmutador reemplazado por interruptores y sensores electrónicos que toman la CC suministrada y la aplican a varios campos para que puedan perseguir su cola como el rotor gira. Nuevamente, es un motor de CA con un controlador. Pregúntale a cualquier devanado. Los sensores están dentro del motor propiamente dicho y los interruptores pueden estar adyacentes al motor propiamente dicho o remotos.
Un motor de inducción de jaula de ardilla agrega un grado de complejidad al usar la rotación de un nido de devanados de baja impedancia dentro del campo del estator para inducir voltaje en las barras del rotor y crear un campo magnético que haga girar el rotor para que persiga el campo de CA giratorio. aplicado a los devanados del estator. Nuevamente, tiene CC monodireccional (pero variable sinusoidalmente) durante cualquier parte de la secuencia de conducción. Es tanto un sistema mixto de CC y CA como cualquier otro.
Uno podría describir a regañadientes los motores de accionamiento por corrientes de Foucault variables: más de lo mismo pero diferente. Es un motor de CA con un controlador que lo produce a partir de CC.
La distinción que se hace es irrelevante y trivial. La verdadera pregunta es "¿por qué Tesla usa esta forma particular de motor en lugar de otra?". Que esto no es solo semántica, sino una falta de comprensión se muestra en la palabra en
El único motor de "CC" que no requiere algún tipo de inversor o sistema de conmutación electrónica es el motor mecánico con escobillas. Estos son tan inadecuados para la tarea de unidades de velocidad variable de peso ligero que se utilizarán pocos o ninguno en los diseños de automóviles eléctricos modernos. TODOS los demás estilos de motores eléctricos que no tienen inversor tendrán algo de electrónica en lugar de un inversor.
Dije que los motores eléctricos ROTARIOS son motores de CA porque podría decirse que se puede producir un motor lineal de motor de CC sin escobillas con operación de CC conmutada únicamente, aunque esto haría un uso ineficiente del cobre y el magnetismo. Se podría hacer eso con un motor rotativo, pero no en el mundo real. la producción de motores en volumen lo haría.
Los motores de CC no pueden igualar la densidad de potencia de las máquinas de CA. La fuerza de campo máxima que pueden alcanzar incluso los mejores imanes es de 2,5 tesla a través del espacio de aire y, para hacerlo, se requiere una ingeniería seria, especialmente si desea girar rápidamente para que su densidad de potencia sea alta. Las máquinas de inducción producen cómodamente más de 3 teslas sin todo el dolor de los imanes y las tontas tolerancias. Obviamente, no hacen esto de manera tan eficiente como las máquinas de CC, pero ¿quién dijo que los autos deportivos eran eficientes a toda máquina? Kg por kg, la máquina de inducción de CA es la más poderosa de todos los tipos de máquinas cuando se controla con un inversor sofisticado y funciona a altas velocidades de rotación.
Las verdaderas razones por las que utilizan motores de inducción para sus coches son:
En mi humilde opinión, la propulsión de CA (Tesla Motors) usa CA porque un motor de CC conmutado mecánicamente que cumple con la alta relación de "reducción" de una aplicación de vehículo es más complejo que un motor de CA conmutado electrónicamente. Sin esa alta relación de reducción, el tamaño físico del motor que produce solo un par bruto sería prohibitivo. El motor de inducción en lugar del motor PM no solo es más estable financieramente, sino también más estable desde el punto de vista de la ingeniería. Los imanes pueden y se dañan. El campo del electroimán se enrolla en el rotor, no tanto y como demuestran, la densidad de energía es similar.
Hago una gran excepción al aparente consenso de que "Todos los motores eléctricos son de CA" y baso mi argumento en un movimiento de un solo polo, no en la revolución completa del motor.
Dentro de un movimiento de un solo polo, la única vez que realmente se requiere CA es cuando es necesario inducir un flujo de corriente en un devanado parásito, como en el rotor de los motores de inducción. De lo contrario, solo es necesaria la conmutación.
Este argumento puede demostrarse mejor observando un motor en parada. Solo los motores sin PM o campos bobinados, que son motores de inducción, necesitan CA para generar la corriente de campo que crea el campo magnético reactivo.
Todos los demás motores solo necesitan proporcionar CC al estator para generar un par completo en la parada. Los motores de campo de herida a menudo usan CA para generar el campo, pero también funcionarán bien con CC, probablemente con incluso más par que cuando están en CA.
Mis "servomotores" PM pueden estar cortando la CC para controlar la potencia, pero solo están cortando la CC, no invirtiéndola con cada corte. Coloque un conmutador mecánico en el servomotor AC PM y funcionará en DC. Cierto, no tan eficiente pero no por la falta de una forma de onda sinusoidal. También estará limitado en la velocidad máxima sin un avance de cepillo mecánico.
Dedique algún tiempo a considerar las propiedades de bloqueo de un motor de doble bobinado, un motor obviamente "solo de CA", cuando se alimenta con CC y tal vez pueda comprender mi argumento. Solo cuando desea empujar cada polo además de tirar de él, debe proporcionar CA; de lo contrario, CC es todo lo que necesita y, a menudo, todo lo que está usando, incluso si la fuente de alimentación es CA.
Pizarra
Todos: Las máquinas cepilladas están limitadas a quizás 48 V para evitar la formación de arcos. Por el contrario, una máquina sin escobillas puede funcionar fácilmente con una batería de 240 V, con un voltaje elevado a 480 V o más mediante un convertidor de refuerzo de CC colocado entre la batería y el motor. Con una tensión tan alta, similar a la utilizada en la mayoría de los coches híbridos o enchufables actuales, se minimizan las pérdidas del control de velocidad en relación a la potencia total transferida, favoreciendo así una alta eficiencia.
En realidad, Tesla usa motores eléctricos síncronos, que usan tanto CA como CC. Si el motor usara solo CA, sería un motor de inducción asíncrono, que es un motor impredecible para usar en vehículos debido al deslizamiento en el campo electromagnético cuando se induce un voltaje en el rotor (La velocidad de salida es más lenta que la rotación del motor). campo electromagnético Fórmula: Revoluciones por minuto = Frecuencia * 60 / Pares de polos por fase - Deslizamiento en velocidad).
En un motor síncrono, tiene una bobina de estator magnificada de CA (como un motor de inducción convencional), pero también tiene un rotor magnificado de CC (a diferencia de un motor de inducción). Al hacer esto, la velocidad de salida puede alcanzar la velocidad máxima teórica (la velocidad sincronizada), lo que hace que el motor sea predecible y efectivo para usar en vehículos. (Fórmula: Revoluciones por minuto=Frecuencia * 60 / Pares de polos por fase).
Tesla puede explotar esto y usar un ESC (controlador electrónico de velocidad). Un ESC es una placa de circuito que invierte parte de la alimentación de CC de la batería a alimentación de CA, cambia las ondas cuadradas a ondas sinusoidales, cambia la frecuencia y la amplitud de acuerdo con las señales del pedal del acelerador y envía la energía procesada al estator. También cambia la amplitud de la potencia de CC al rotor en línea con la potencia de CA al estator.
{kind=link}
{kind=link}
{kind=link}
Vicente Roberto
usuario51119
Iglesia
yurtesen