¿Cómo selecciono una ganancia de controlador adecuada para este piloto automático de control de balanceo?
Liam
Estoy tratando de seleccionar un valor K adecuado para este piloto automático de control de balanceo, basado en:
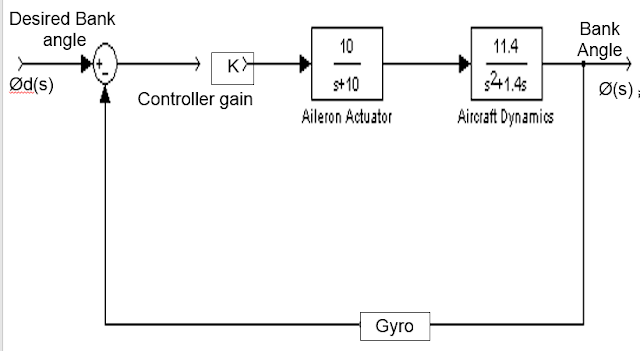
En lugar del Gyro, también he considerado una retroalimentación de ganancia proporcional unitaria negativa. ¿Cómo selecciono la ganancia K del controlador apropiada para el sistema? (Estoy alimentando un impulso de paso en el sistema). Sé que para cada avión sería diferente, para un avión de combate quieres tiempos de respuesta rápidos, pero tal vez no tanto en un avión comercial. Lo que estoy tratando de averiguar/entender es que hay criterios de diseño/un método para seleccionar este valor.
- ¿Hay un sobreimpulso (%) al que debería apuntar?
- ¿Se ha establecido una relación de amortiguamiento requerida?
- ¿O lo observo y encuentro un equilibrio entre el tiempo para asentarse y sobrepasar (%)?
Respuestas (1)
Koyovis
Desea una respuesta rápida, pero no un exceso. La respuesta perfecta a una entrada de paso en este caso sería críticamente amortiguada . Matlab/Simulink son tus amigos aquí.
Cosas a considerar en su ciclo de retroalimentación:
- Dinámica de aeronaves: ¿se modela la respuesta de inercia inicial? Es decir, ¿la bobina de balanceo de la aeronave alcanza su velocidad de balanceo final al desviarse el alerón?
- ¿Se modela la resistencia aerodinámica al balanceo?
- ¿Es un bucle digital y, de ser así, qué integradores está utilizando? Si Euler, sus tasas de bucle deben ser altas.
He visto un diseño similar para un helicóptero con una ganancia de controlador de 20 y un compensador de balanceo adicional en el bucle de avance, y una retroalimentación de unidad negativa.
Puede observar la respuesta, usar diferentes configuraciones para la ganancia de retroalimentación y encontrar la respuesta más rápida sin sobrepasarse. Tendrías que probarlo para varios extremos. También necesita algún tipo de retroalimentación de amortiguación, creo que su primera tarea sería encontrar una respuesta que no sea oscilante.
¿Cuál es el propósito de esta tira del borde de salida del alerón?
¿Qué tipo de cable se usa para transmitir la señal de las computadoras de control de vuelo a los actuadores?
¿Por qué los cables de control de vuelo no se aflojan durante las bajas temperaturas en crucero?
¿Por qué no todos los aviones de GA tienen amortiguadores de guiñada?
¿En qué se diferencian las pestañas servoascensor y antiservo (engranadas)?
¿Algunas técnicas de vuelo desgastan el avión más rápido que otras?
¿Por qué el yugo se "pega" en una posición de giro?
¿Por qué los controles de los aviones de categoría transporte son mucho más pesados que los de los aviones ligeros?
¿Desviación de alerones del F16 en ganancia de despegue y aterrizaje?
¿Cómo puede una mayor envergadura disminuir la fuerza de los vórtices en las puntas de las alas?
federico
Liam
federico
Liam